 我的书签
我的书签
 添加书签
添加书签 移除书签
移除书签动量优化
想象一下,一个保龄球在一个光滑的表面上平缓的斜坡上滚动:它会缓慢地开始,但是它会很快地达到最终的速度(如果有一些摩擦或空气阻力的话)。 这是 Boris Polyak 在 1964 年提出的动量优化背后的一个非常简单的想法。相比之下,普通的梯度下降只需要沿着斜坡进行小的有规律的下降步骤,所以需要更多的时间才能到达底部。
回想一下,梯度下降只是通过直接减去损失函数J(θ)相对于权重θ的梯度,乘以学习率η来更新权重θ。 方程是: 。它不关心早期的梯度是什么。 如果局部梯度很小,则会非常缓慢。
。它不关心早期的梯度是什么。 如果局部梯度很小,则会非常缓慢。
动量优化很关心以前的梯度:在每次迭代时,它将动量矢量m(乘以学习率η)与局部梯度相加,并且通过简单地减去该动量矢量来更新权重(参见公式 11-4)。 换句话说,梯度用作加速度,不用作速度。 为了模拟某种摩擦机制,避免动量过大,该算法引入了一个新的超参数β,简称为动量,它必须设置在 0(高摩擦)和 1(无摩擦)之间。 典型的动量值是 0.9。
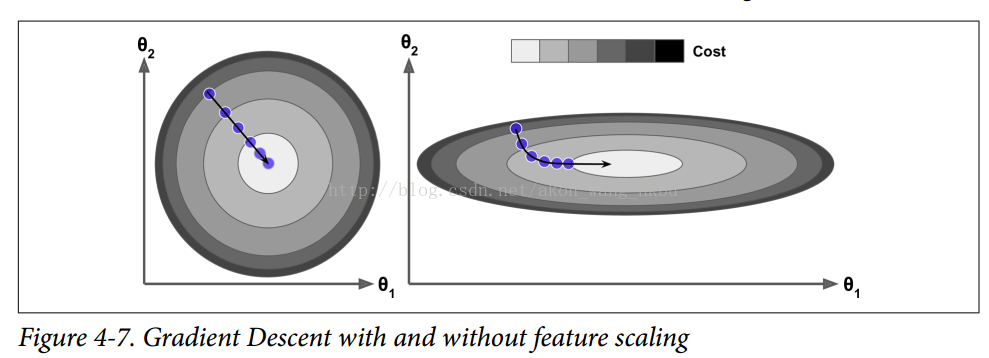
您可以很容易地验证,如果梯度保持不变,则最终速度(即,权重更新的最大大小)等于该梯度乘以学习率η乘以1/(1-β)。 例如,如果β = 0.9,则最终速度等于学习率的梯度乘以 10 倍,因此动量优化比梯度下降快 10 倍! 这使动量优化比梯度下降快得多。 特别是,我们在第四章中看到,当输入量具有非常不同的尺度时,损失函数看起来像一个细长的碗(见图 4-7)。 梯度下降速度很快,但要花很长的时间才能到达底部。 相反,动量优化会越来越快地滚下山谷底部,直到达到底部(最佳)。
在不使用批标准化的深层神经网络中,较高层往往会得到具有不同的尺度的输入,所以使用动量优化会有很大的帮助。 它也可以帮助滚过局部最优值。
由于动量的原因,优化器可能会超调一些,然后再回来,再次超调,并在稳定在最小值之前多次振荡。 这就是为什么在系统中有一点摩擦的原因之一:它消除了这些振荡,从而加速了收敛。
在 TensorFlow 中实现动量优化是一件简单的事情:只需用MomentumOptimizer替换GradientDescentOptimizer,然后躺下来赚钱!

动量优化的一个缺点是它增加了另一个超参数来调整。 然而,0.9 的动量值通常在实践中运行良好,几乎总是比梯度下降快。
