 我的书签
我的书签
 添加书签
添加书签 移除书签
移除书签- CUAV v5
- 快速预览
- 采购
- 接口定义 {#connection}
- 额定电压
- 编译固件
- Debug调试端口
- 外部设备
- 支持的平台/机身
- 更多信息
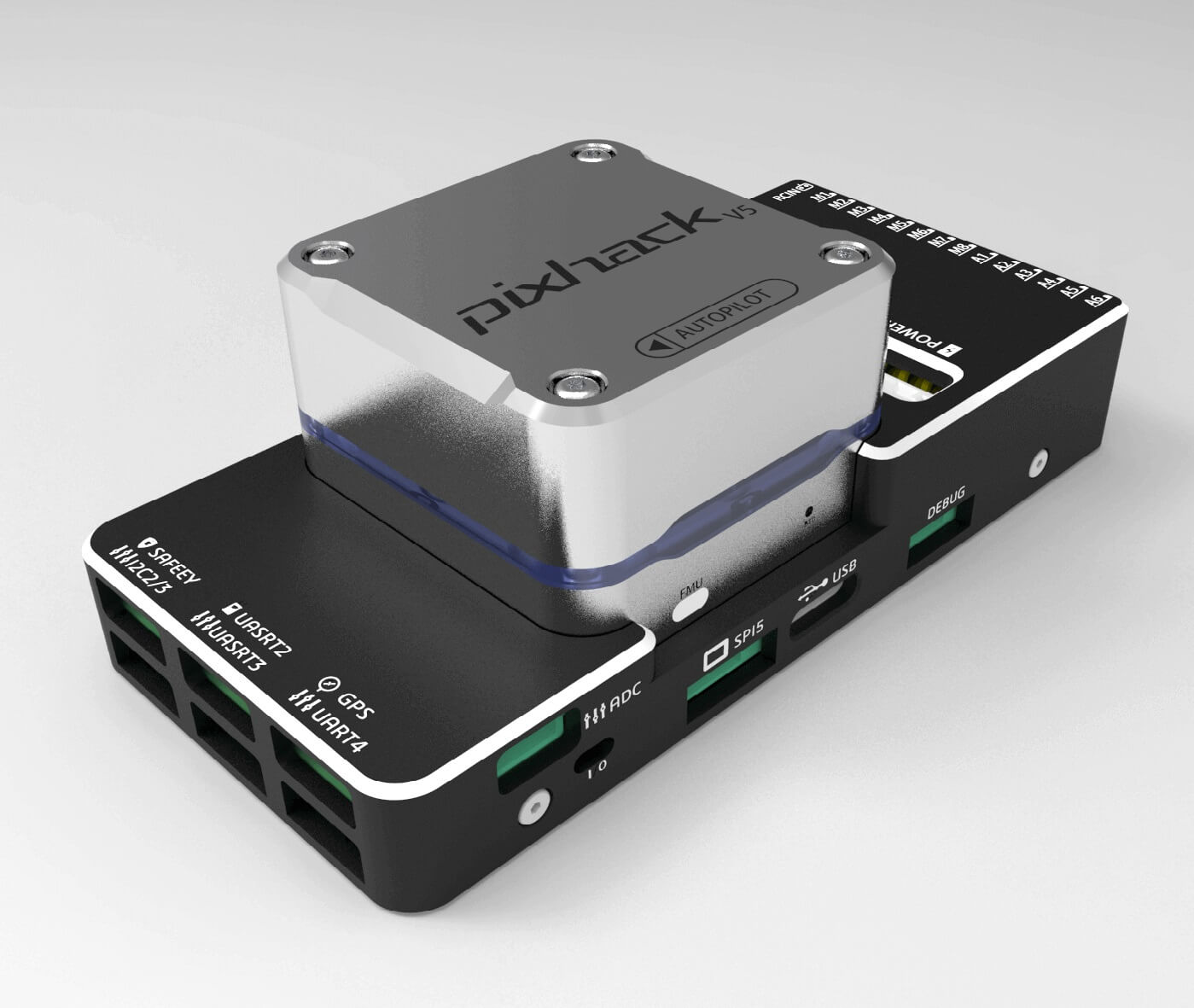
CUAV v5
CUAV v5® (previously “Pixhack v5”) is an advanced autopilot designed and made by CUAV®. 该控制器基于Pixhawk项目的FMUv5 开源硬件设计。 它在NuttX OS操作系统上运行PX4,并与PX4固件完全兼容。 它主要面向学术和商业开发者。
快速预览
- 主处理器:STM32F765
- 32 位 Arm® Cortex®-M7,216MHz,2MB 储存,512KB RAM
IO 处理器:STM32F100
- 32 位 Arm® Cortex®-M3,24MHz,8KB SRAM
内置传感器:
- 加速度计/陀螺仪:ICM-20689
- 加速度计/陀螺仪:BMI055
- 磁力计:IST8310
- 气压计:MS5611
接口:
- 14路PWM输出 (6路来自FMU, 8路来自 IO)
- FMU上有3个专用PWM/Capture输入
- CPPM专用的RC输入
- Dedicated R/C input for PPM and S.Bus
- 电平/PWM RSSI输入
- S.BUS伺服输出
- 5个通用串行口
- 4路I2C总线
- 4路SPI总线
- 2路CAN总线
- 2个电池电流/电压模拟输入口
- 电源系统:
- 输入电压:4.3~5.4V
- USB输入电压: 4.75~5.25V
- 伺服导轨输入电压:0~36V
- 重量和尺寸:
- 重量:99g
- 尺寸:448412mm
- 其它特性:
- 工作温度:-20 ~ 80°C (实测值)
采购
从 CUAV 官方淘宝店采购。
接口定义 {#connection}
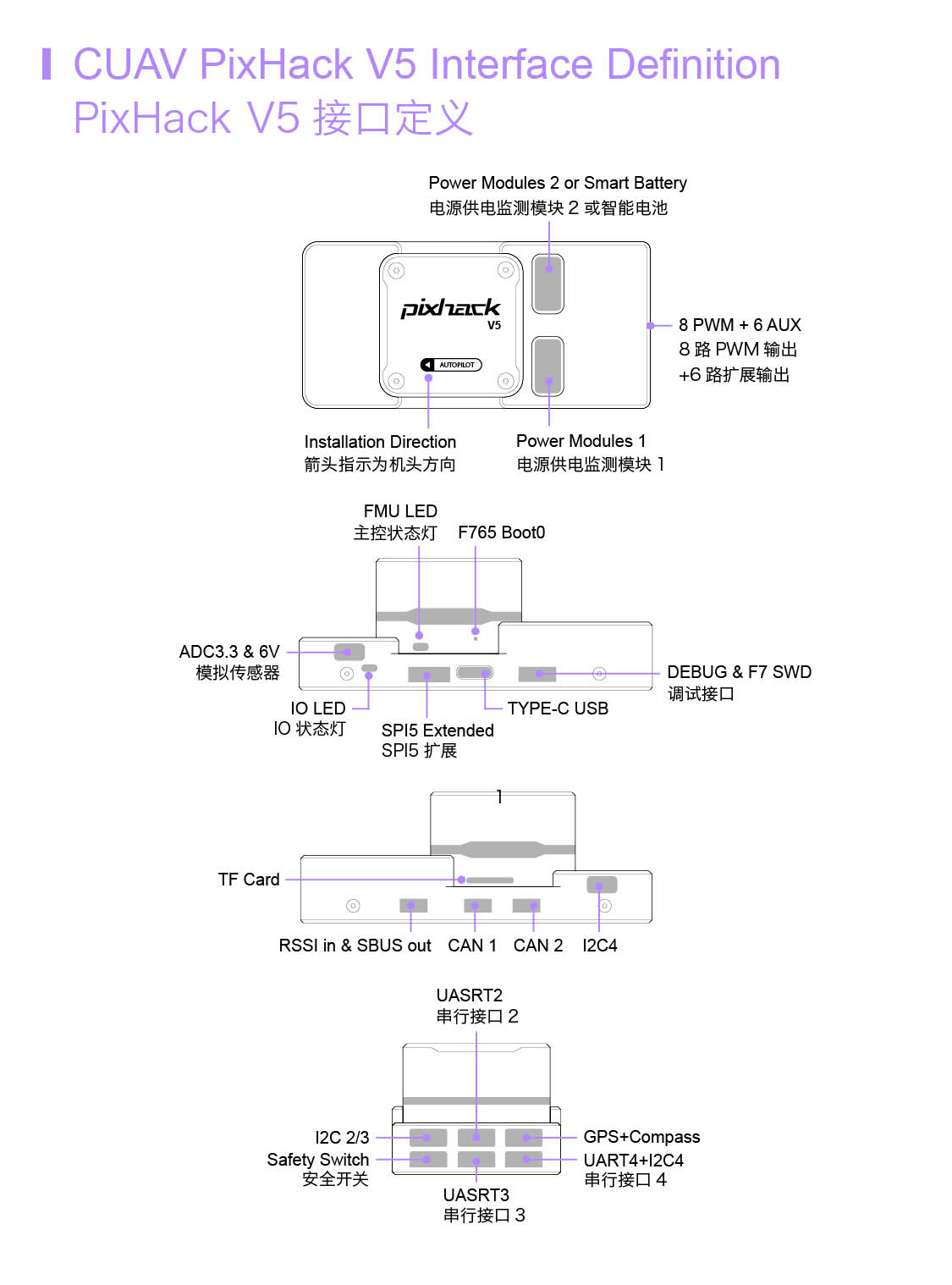
Warning RCIN接口仅限于为遥控接收机供电,不能连接任何电源/负载。
额定电压
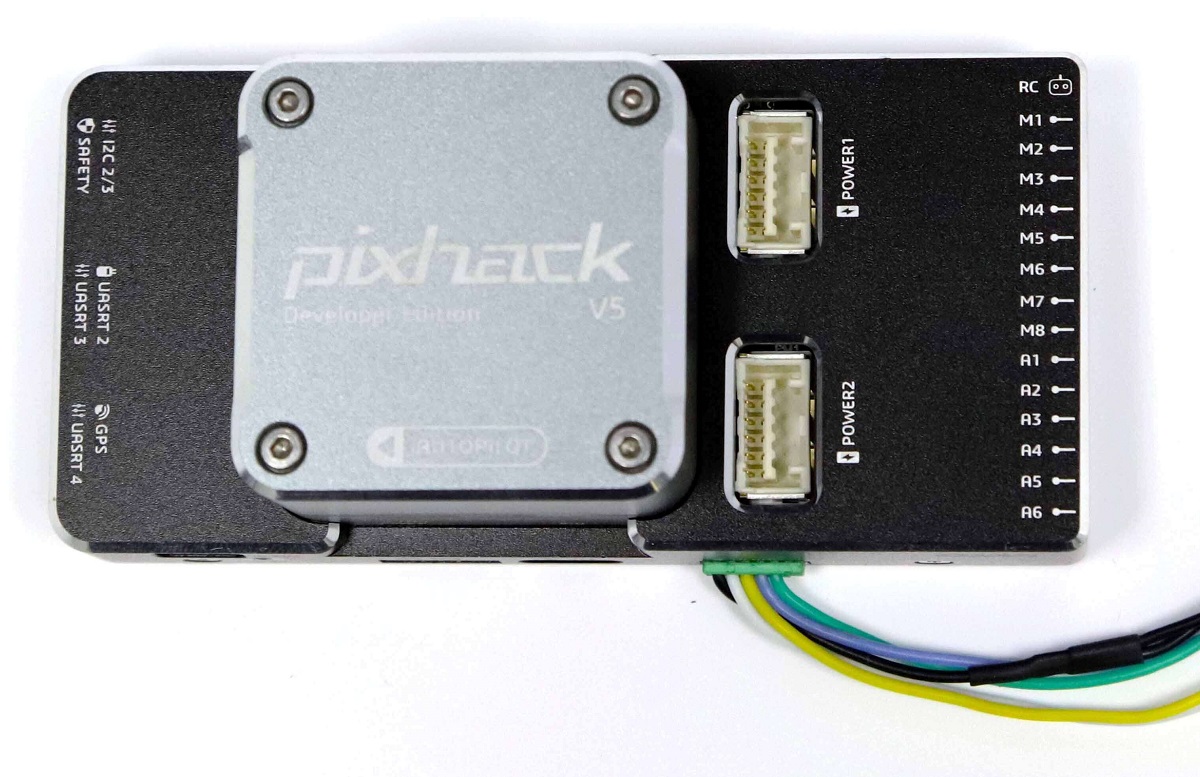
CUAV v5 can be triple-redundant on the power supply if three power sources are supplied. 三个电源口:POWER1, POWER2 and USB。
Note输出电源轨 FMU PWM OUT和IO PWM OUT (0V至36V)不为飞行控制器供电(并且不由其供电)。 您必须在POWER1 、POWER2 或 USB 任一接口中接入电源,否则主板将断开供电。
正常运行最大额定值
在这些条件下,所有电源将按此顺序用于为系统供电:
- POWER1 和 POWER2 输入电压 (4.3 v 至 5.4 v)
- USB 输入电压 (4.75 v 至 5.25 v)
编译固件
Tip大多数用户将不需要构建此固件! 它是预构建的, 并在连接适当的硬件时由 QGroundControl 自动安装。
为此目标 编译 PX4:
make px4_fmu-v5_default
Debug调试端口
系统的串行控制台和SWD接口在 FMU Debug 端口上运行。 只需将FTDI电缆连接到Debug & F7 SWD连接器。 To access the I/O Debug port, the user must remove the CUAV v5 shell. 这两个端口都有标准串行引脚, 可以连接到标准的FTDI电缆(3.3 v,但耐压5v )。
引脚排列如图所示
| 针脚 | CUAV v5 debug |
|---|---|
| 1 | GND |
| 2 | FMU-swclk |
| 3 | FMU-SWDIO |
| 4 | UART7_RX |
| 5 | UART7_TX |
| 6 | VCC |
外部设备
- 数字空速传感器
- 遥测无线电模块
- 距离传感器
支持的平台/机身
任何可用普通RC伺服系统或Futaba S-Bus伺服系统控制的多旋翼、固定翼、无人机、无人船。 全部可支持的机型可见 机型参考。
更多信息
FMUv5参考设计。
- CUAV v5 docs
- CUAV Github库
