 我的书签
我的书签
 添加书签
添加书签 移除书签
移除书签- Slew-rate Type Trajectory for Multicopters
- Position Mode
- MPC_ACC_HOR_MAX
- MPC_ACC_HOR and MPC_DEC_HOR_SLOW {#mpc_acc_hor-and-mpc_dec_hor_slow}
- MPC_ACC_UP_MAX and MPC_ACC_DOWN_MAX
- MPC_JERK_MAX and MPC_JERK_MIN
- Position Mode
- Mission Mode
Slew-rate Type Trajectory for Multicopters
The Slew Rate trajectory type should be used when a quick (and potentially “jerky”) response to stick input is more important than ensuring smooth acceleration and deceleration (e.g.: for inspection, aggressive flight with position hold, fast missions).
This type is a simple implementation where the jerk and acceleration is limited using slew-rates. In manual mode, it allows asymmetric profiles based on user intention (smooth acceleration and quick stop). The jerk and acceleration limits are not hard constraints.
Enable this trajectory type using the following parameter settings: MPC_POS_MODE=1, MPC_POS_MODE=2, MPC_AUTO_MODE=0.
Note Setpoint Tuning (Trajectory Generator) also supports MC Jerk-limited Trajectory Tuning for smoother responses.
This topic explains how the trajectory type works, and can be tuned, in both position and mission modes.
Position Mode
In Position mode the stick inputs are mapped to either position-control or velocity-control.
Position-control is active when the stick inputs are within the deadzone MPC_HOLD_DZ, and velocity-control otherwise. All the parameters below are tuning parameters and cannot be mapped directly to the physical quantity.
MPC_ACC_HOR_MAX
This parameter is used for position-control in the horizontal direction, where the vehicle is supposed to stay at the current location. The limit for the rate of change of the velocity setpoint is defined by MPC_ACC_HOR_MAX. This parameter should be set larger than any of the other acceleration related parameters in the horizontal direction.
MPC_ACC_HOR and MPC_DEC_HOR_SLOW {#mpc_acc_hor-and-mpc_dec_hor_slow}
In velocity-control the rate limit for the velocity setpoint is extracted from a linear map from stick input to acceleration limit with maximum MPC_ACC_HOR and minimum MPC_DEC_HOR_SLOW. For example, if the stick input is at MPC_HOLD_DZ, the limiting acceleration is MPC_DEC_HOR_SLOW. If the stick input is at maximum (=1), the limiting acceleration is MPC_ACC_HOR and any stick input in between is mapped linearly between the two parameters. In addition, MPC_DEC_HOR_SLOW also limits the change in velocity setpoint when the user demands a deceleration in the current flight direction. For instance, if the stick input changes from maximum (=1) to 0.5, the velocity setpoint change will be limited by MPC_DEC_HOR_SLOW.
During transition from velocity-control to position-control, there is a hard switch from from MPC_ACC_HOR to MPC_ACC_HOR_MAX and a reset of the velocity setpoint to the current vehicle velocity. The reset and the hard switch can both introduce a jerky flight performance during stopping. Nonetheless, the reset is required because the smoothing parameters introduce a delay to the setpoint, which can lead to unexpected flight maneuvers.
A simple example explaining why the reset is needed is given below.
Consider the case where a user demands full speed from hover followed by a stop request. This is equivalent to full stick input with maximum value of 1 followed by zero stick input. To simplify the example, assume that MPC_ACC_HOR_MAX is equal to MPC_ACC_HOR and therefore there is no hard switch in acceleration limit when switching from velocity-control to position-control. In addition, let’s assume the maximum speed that can be demanded is 4 m/s.
During full stick input, the velocity setpoint will not change directly from 0 m/s to 4 m/s (aka step input) - instead the velocity setpoint follows a ramp with slope MPC_ACC_HOR. The actual velocity of the vehicle, however, will not track the setpoint perfectly, but rather will lag behind. The lag will be more significant the larger the value of MPC_ACC_HOR.

Without the reset (the top graph), at the moment of the stop demand (stick equal 0) the velocity setpoint will ramp down with the maximum rate given by MPC_ACC_HOR_MAX. Due to the lag the vehicle will first continue to accelerate in the direction previous to the stop demand followed by slowly decelerating towards zero. With the reset of the velocity setpoint to the current velocity, the delay due to the lag during stop demand can be overcome.
MPC_ACC_UP_MAX and MPC_ACC_DOWN_MAX
MPC_ACC_UP_MAX >= MPC_ACC_DOWN_MAX, otherwise the firmware will overwrite the given values.
- position-control: the limit in velocity setpoint change in z-direction is given by MPC_ACC_UP_MAX.
- velocity-control: the limit in velocity setpoint change for stick input is
MPC_ACC_UP_MAXfor upward and MPC_ACC_DOWN_MAX for downward direction.
MPC_JERK_MAX and MPC_JERK_MIN
These two parameters only have effect during the transition from velocity-control to position-control. The purpose of these two parameters are to minimize the jerk introduced from forward flight to hover (please see MPC_ACC_HOR and MPC_DEC_HOR_SLOW).
The jerk-parameter controls the rate limit with which the acceleration limit can change to MPC_ACC_HOR_MAX. The actual jerk-value is a linear map from velocity speed to jerk where full speed maps to MPC_JERK_MAX and zero speed to MPC_JERK_MIN. The smoothing can be turned off by setting MPC_JERK_MAX to a value smaller than MPC_JERK_MIN.
Mission Mode
In Mission mode the vehicle always follows a straight line from the previous waypoint to the current target.
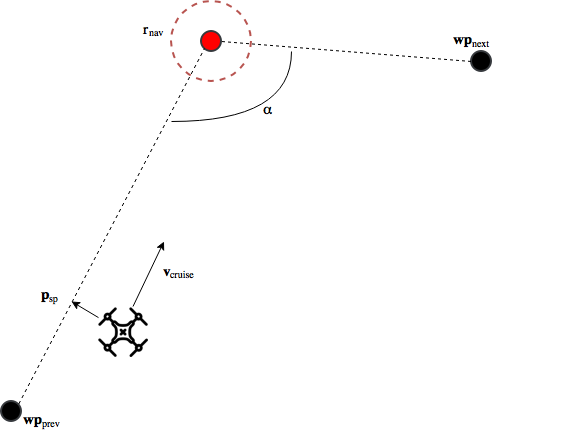
\mathbf{wp}_{prev} is the previous waypoint that either was already passed or is the position at the time when the new target waypoint was received, but no previous waypoint provided.
The setpoint during line tracking can be split into two components:
- position setpoint $$\mathbf{p}_{sp}$$: it is the pose on the track closest to vehicle position
- velocity setpoint $$\mathbf{v}_{cruise}$$: it the desired velocity along the track
The cruise speed of \mathbf{v}{cruise} is by default MPC_XY_CRUISE. However, if the target waypoint (red circle) is close to the previous waypoint, the cruise speed will be adjusted accordingly. To reach the cruise speed, \mathbf{v}{cruise} will accelerate with MPC_ACC_HOR.
When the vehicle is 1.5 x MPC_XY_CRUISE in front of the target waypoint, the vehicle will start to decelerate to a target speed that depends on the angle \alpha. The function used for the mapping from angle to target speed is an exponential function of the form a \times b^{x} + c:
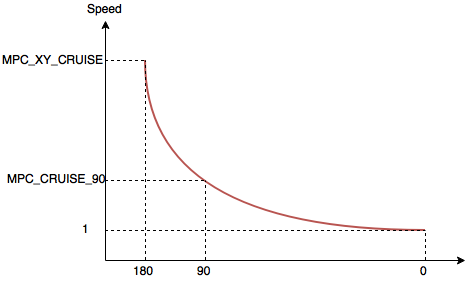
At an angle of 180 degrees, which corresponds to a straight line from \mathbf{wp}{prev} to \mathbf{wp}{next} with the target waypoint somewhere in between, the target speed at the target waypoint will be MPC_XY_CRUISE. If the angle is 0 degrees, which corresponds to having \mathbf{wp}{next} on the line \mathbf{wp}{prev} to target waypoint, then the target speed is set to a minimum speed of 1 m/s. If the angle is 90 degrees, the target speed is set to MPC_CRUISE_90. All other possible angles are mapped to the target speed from the same exponential function. If there is no \mathbf{wp}_{next} present, then the vehicle will just decelerate to zero cruise speed.
A target waypoint is considered reached once the vehicle is within the acceptance radius r_{rad} that is parametrized by NAV_ACC_RAD.
In addition, the vehicle also has to reach the desired altitude (threshold NAV_MC_ALT_RAD) and the desired yaw (threshold MIS_YAW_ERR). Once the vehicle enters that circle, the waypoints will update. \mathbf{wp}{next} will become the new target waypoint, \mathbf{wp}{prev} will assume the old target waypoint and a new \mathbf{wp}_{next} will be added.
