 我的书签
我的书签
 添加书签
添加书签 移除书签
移除书签- Archived: BirdsEyeView FireFly Y6 Tiltrotor VTOL (Pixhawk)
- Airframe Setup
- Propeller orientation
- Autopilot and Peripherals Wiring
- Motor and Servo Setup
- Firmware & Settings
- Video
- Airframe Setup
Archived: BirdsEyeView FireFly Y6 Tiltrotor VTOL (Pixhawk)
Archived The DIY version of the BirdsEyeView FireFly Y6 frame is no longer available. The topic may be removed in future.
The BirdsEyeView FireFly Y6 Tiltrotor VTOL is a mapping, sports and cargo aircraft. This topic provides build and configuration instructions for using the frame with the Pixhawk flight controller, including how to install and configure the PX4 autopilot using QGroundControl.
Key information:
- Frame: BirdsEyeView FireFly Y6 - DIY Frame (No longer available)
- Flight controller: Pixhawk

Airframe Setup
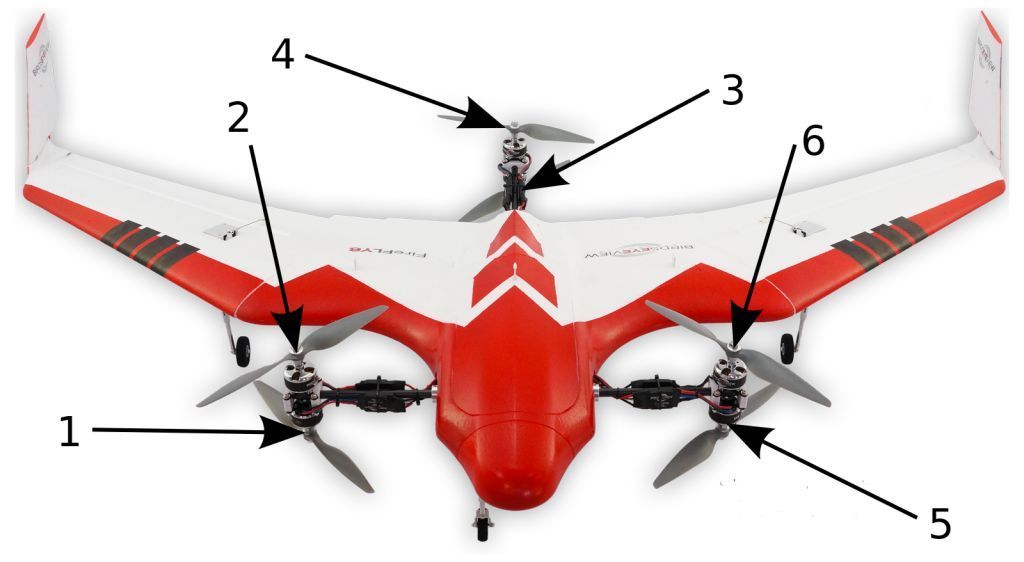
Propeller orientation
Make sure that the propellers are installed correctly. These photos show the direction and orientation of each prop. The top motors should spin in a CCW direction while the motors at the bottom should spin in a CW direction. The ESCs come pre-soldered to the motors so the direction of rotation is fixed (counter clockwise on top and clockwise on the bottom).



Autopilot and Peripherals Wiring
The picture below shows one way of installing the Pixhawk, telemetry radio and GPS. Note that if you place the GPS on top of the power distribution board you probably should not use it as the external magnetometer.
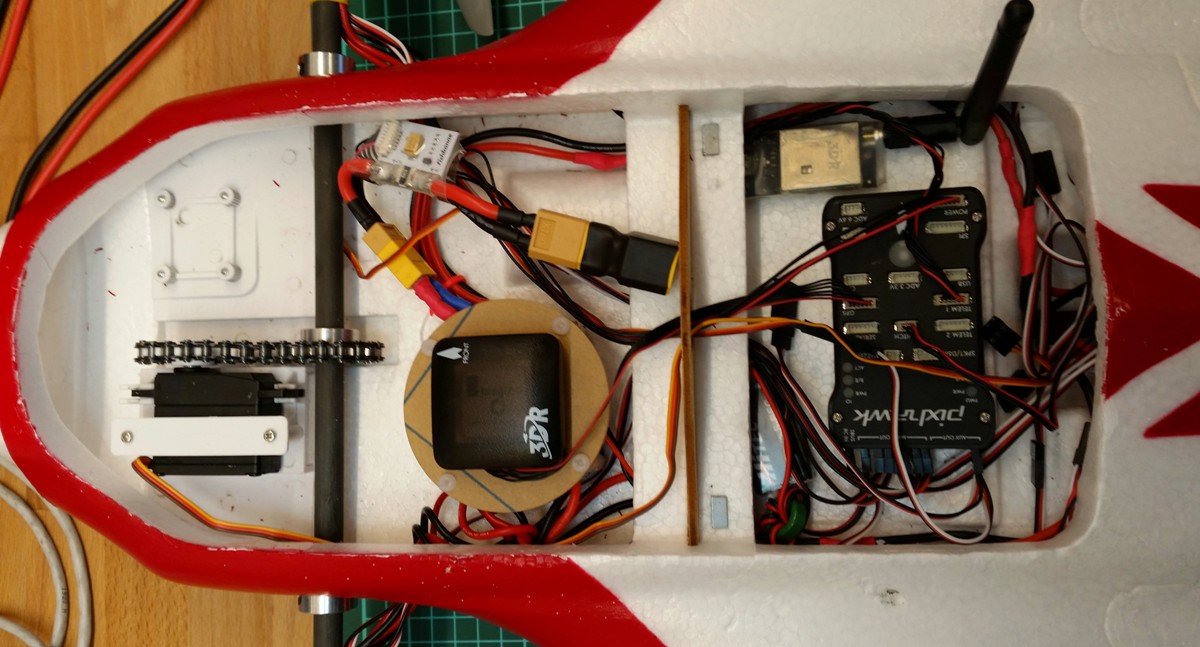
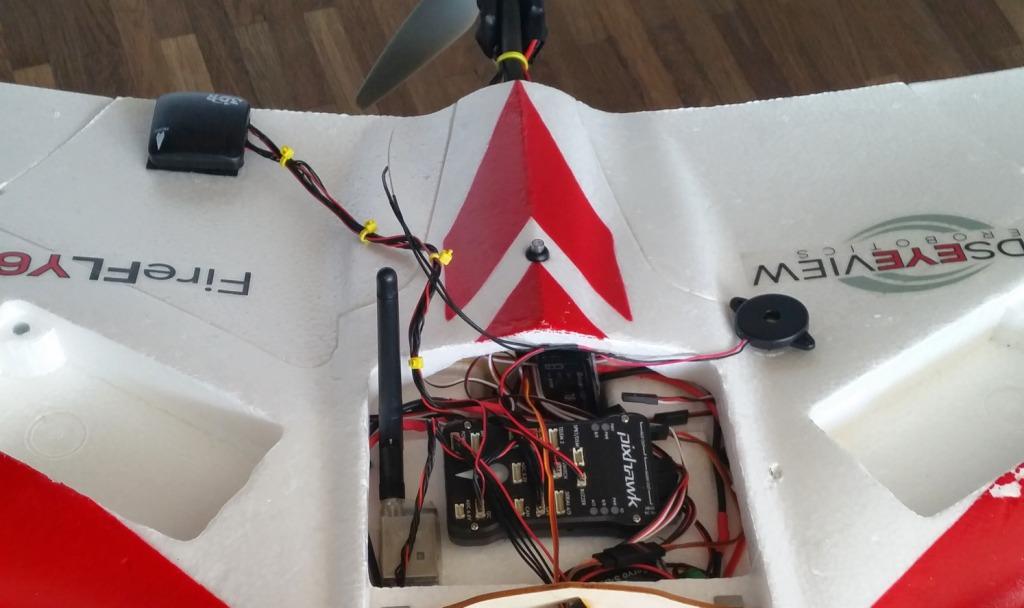
With the above there was significant magnetic disturbances on the in-build magnetometer. If a bench test shows a drifting heading as you throttle up (props on to get enough current flowing) you may need to use the external GPS magnetometer and move it out onto the wing as shown in this photo. Of course the cabling should be improved.
Motor and Servo Setup
- Connect the motors to the main out rail (MAIN OUT) of the Pixhawk according to the scheme seen below
- Connect the tilt-rotor servo into AUX OUT1
- Connect the two elevon servos into AUX OUT2-3
- Connect the servo cable of the landing gear into AUX OUT4
Firmware & Settings
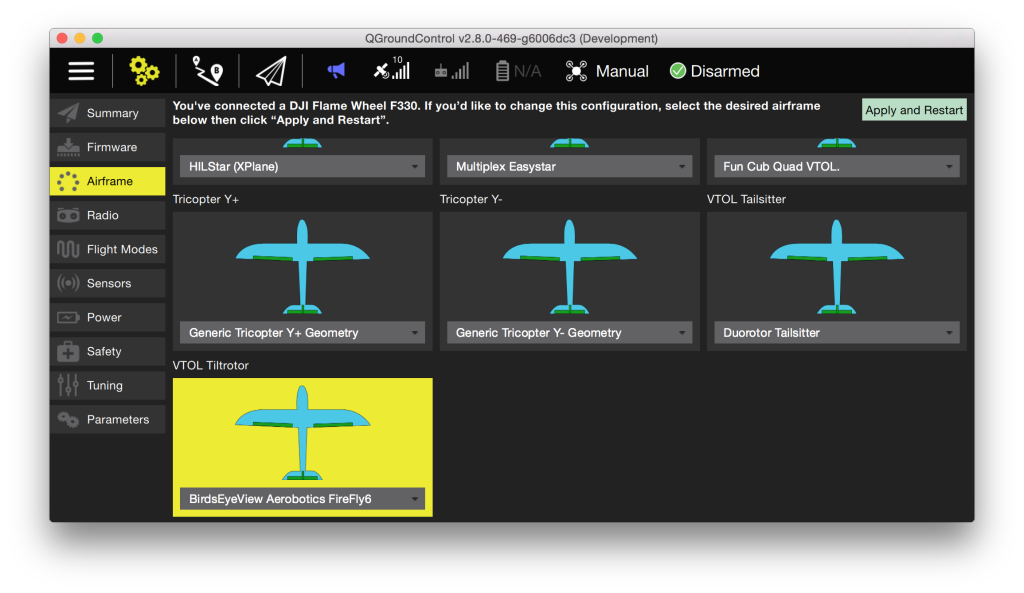
Flash the stable firmware using QGroundControl. In QGroundControl select the airframe configuration “BirdsEyeView Aerobotics FireFly6” under “VTOL Tiltrotor” and then restart.
Should the airframe not be available you could set the following parameters and restart:
- SYS_AUTOSTART to 13002
- SYS_AUTOCONFIG to 1
After the reboot the configuration values will match the Standard Power Pack. The following table serves as a guide when using the high efficiency setup.
| 参数 | Standard | High-Efficiency |
|---|---|---|
| MC_PITCHRATE_FF | 0.0 | 0.0 |
| MC_PITCHRATE_D | 0.004 | 0.005 |
| MC_PITCHRATE_I | 0.002 | 0.09 |
| MC_PITCHRATE_P | 0.14 | 0.125 |
| MC_PITCH_P | 7.0 | 6.0 |
| MC_ROLLRATE_FF | 0.0 | 0.0 |
| MC_ROLLRATE_D | 0.005 | 0.003 |
| MC_ROLLRATE_I | 0.002 | 0.06 |
| MC_ROLLRATE_P | 0.19 | 0.125 |
| MC_ROLL_P | 7.0 | 6.35 |
| MC_YAW_FF | 0.5 | 0.3 |
| MC_YAWRATE_FF | 0.0 | 0.0 |
| MC_YAWRATE_D | 0.0 | 0.0 |
| MC_YAWRATE_I | 0.02 | 0.0 |
| MC_YAWRATE_P | 0.22 | 0.35 |
| MC_YAW_P | 4.0 | 2.6 |
The system should now be ready for sensor calibration, at the end of which it should allow arming.
备注:
- Remember to assign the transition switch for switching to fixed-wing.
- By default permanent stabilization is enabled. If you like fully manual flying in fixed-wing, set VT_FW_PERM_STAB to 0.
The first thing to do is to try out the multicopter mode and get used to the vehicle. Also the PID attitude controllers of the vehicle should be tuned via QGroundControl before you proceed.
Video
{% youtube %} https://youtu.be/Vsgh5XnF44Y {% endyoutube %}
