 我的书签
我的书签
 添加书签
添加书签 移除书签
移除书签- 4.2 使用期望值等待一次性事件
- 4.2.1 后台任务的返回值
- 4.2.2 任务与期望值关联
- 4.2.3 使用(std::)promises
- 4.2.4 将异常存与期望值中
- 4.2.5 多个线程的等待
4.2 使用期望值等待一次性事件
假设你乘飞机去国外度假。当你到达机场并办理完各种登机手续后,还需要等待机场广播通知登机时(可能要等很多个小时),你可能会在候机室里面找一些事情来打发时间,比如:读书,上网,或者来一杯价格不菲的机场咖啡。不过,从根本上来说你就在等待一件事情:机场广播能够登机的时间。之前飞机的班次在之后没有可参考性,因为当你在再次度假的时候,可能会选择等待另一班飞机。
C++标准库模型将这种一次性事件称为期望值(future)。当线程需要等待特定的一次性事件时,某种程度上来说就需要知道这个事件在未来的期望结果。之后,这个线程会周期性(较短的周期)的等待或检查,事件是否触发(检查信息板);检查期间也会执行其他任务(品尝昂贵的咖啡)。另外,等待任务期间它可以先执行另外一些任务,直到对应的任务触发,而后等待期望值的状态会变为就绪(ready)。一个期望值可能是数据相关的(比如,你的登机口编号),也可能不是。当事件发生时(并且期望状态为就绪),并且这个期望值就不能被重置。
C++标准库中,有两种期望值,使用两种类型模板实现,声明在<future>头文件中: 唯一期望值(unique futures)(std::future<>)和共享期望值(shared futures)(std::shared_future<>)。仿照了std::unique_ptr和std::shared_ptr。std::future的实例只能与一个指定事件相关联,而std::shared_future的实例就能关联多个事件。后者的实现中,所有实例会在同时变为就绪状态,并且他们可以访问与事件相关的任何数据。这种数据关联与模板有关,比如std::unique_ptr 和std::shared_ptr的模板参数就是相关联的数据类型。与数据无关处,可以使用std::future<void>与std::shared_future<void>的特化模板。虽然,我希望用于线程间的通讯,但是期望值对象本身并不提供同步访问。当多个线程需要访问一个独立期望值对象时,必须使用互斥量或类似同步机制对访问进行保护,如在第3章所述。不过,在将要阅读到的4.2.5节中,多个线程会对一个std::shared_future<>实例的副本进行访问,即使他们是同一个异步结果,也不需要同步期望值。
并行技术规范将这两个模板类在std::experimental命名空间中进行了扩展:std::experimental::future<>和std::experimental::shared_future<>。这个命名空间就是为了将其与std命名空间中的模板类进行区分,实验性的命名空间中为这两个模板类添加了更多的功能。尤为重要的是std::experimental中的内容与代码质量无关(我希望这里也会有较高质量的实现),需要强调是这个命名空间提供的类和函数都不是标准的,这个命名空间中类和函数的语法和语义,很可能与纳入C++标准(也就是std命名空间)后有所不同。如果想要使用这两个试验性的模板类,需要包含<experimental/future>头文件。
最简单的一次性事件,就是一个后台运行出的计算结果。第2章中已经清楚了std::thread 执行的任务不能有返回值,并且我能保证,这个问题将在使用期望值解决——现在就来看看是怎么解决的。
4.2.1 后台任务的返回值
假设,你有一个需要长时间的运算,你需要其能计算出一个有效的值,但是你现在并不迫切需要这个值。可能你已经找到了生命、宇宙,以及万物的答案,就像道格拉斯·亚当斯[1]一样。你可以启动一个新线程来执行这个计算,这就意味着你需要计算的结果,因为std::thread并不提供直接接收返回值的机制。这里就需要std::async函数模板(也是在头文<future>中声明的)。
当不着急要任务结果时,可以使用std::async启动一个异步任务。与std::thread对象等待的方式不同,std::async会返回一个std::future对象,这个对象持有最终计算出来的结果。当需要这个值时,只需要调用这个对象的get()成员函数;并且会阻塞线程直到期望值状态为就绪为止;之后,返回计算结果。下面清单中代码就是一个简单的例子。
清单4.6 使用std::future从异步任务中获取返回值
#include <future>#include <iostream>int find_the_answer_to_ltuae();void do_other_stuff();int main(){std::future<int> the_answer=std::async(find_the_answer_to_ltuae);do_other_stuff();std::cout<<"The answer is "<<the_answer.get()<<std::endl;}
与std::thread 做的方式一样,std::async允许你通过添加额外的调用参数,向函数传递额外的参数。当第一个参数是一个指向成员函数的指针,第二个参数提供有这个函数成员类的具体对象(不是直接的,就是通过指针,还可以包装在std::ref中),剩余的参数可作为成员函数的参数传入。否则,第二个和随后的参数将作为函数的参数,或作为指定可调用对象的第一个参数。就如std::thread,当参数为右值时,拷贝操作将使用移动的方式转移原始数据。这就允许使用“只移动”类型作为函数对象和参数。来看一下下面的程序清单:
清单4.7 使用std::async向函数传递参数
#include <string>#include <future>struct X{void foo(int,std::string const&);std::string bar(std::string const&);};X x;auto f1=std::async(&X::foo,&x,42,"hello"); // 调用p->foo(42, "hello"),p是指向x的指针auto f2=std::async(&X::bar,x,"goodbye"); // 调用tmpx.bar("goodbye"), tmpx是x的拷贝副本struct Y{double operator()(double);};Y y;auto f3=std::async(Y(),3.141); // 调用tmpy(3.141),tmpy通过Y的移动构造函数得到auto f4=std::async(std::ref(y),2.718); // 调用y(2.718)X baz(X&);std::async(baz,std::ref(x)); // 调用baz(x)class move_only{public:move_only();move_only(move_only&&)move_only(move_only const&) = delete;move_only& operator=(move_only&&);move_only& operator=(move_only const&) = delete;void operator()();};auto f5=std::async(move_only()); // 调用tmp(),tmp是通过std::move(move_only())构造得到
默认情况下,期望值是否等待取决于std::async是否启动一个线程,或是否有任务正在进行同步。大多数情况下(估计这就是你想要的结果),也可以在函数调用之前向std::async传递一个额外参数,这个参数的类型是std::launch,还可以是std::launch::defered,表明函数调用被延迟到wait()或get()函数调用时才执行,std::launch::async 表明函数必须在其所在的独立线程上执行,std::launch::deferred | std::launch::async表明实现可以选择这两种方式的一种。最后一个选项是默认的,当函数调用被延迟,它可能不会在运行了。如下所示:
auto f6=std::async(std::launch::async,Y(),1.2); // 在新线程上执行auto f7=std::async(std::launch::deferred,baz,std::ref(x)); // 在wait()或get()调用时执行auto f8=std::async(std::launch::deferred | std::launch::async,baz,std::ref(x)); // 实现选择执行方式auto f9=std::async(baz,std::ref(x));f7.wait(); // 调用延迟函数
本章的后面和第8章中,将会再次看到这段程序,使用std::async会更容易让算法分割到各个任务中,这样程序就能并发的执行了。不过,这不是让std::future与任务实例相关联的唯一方式;你也可以将任务包装入std::packaged_task<>实例中,或通过编写代码的方式,使用std::promise<>类型模板显示设置值。与std::promise<>对比,std::packaged_task<>具有更高层的抽象,所以我们从“高抽象”的模板说起。
4.2.2 任务与期望值关联
std::packaged_task<>对一个函数或可调用对象,绑定一个期望值。当调用std::packaged_task<> 对象时,它就会调用相关函数或可调用对象,将期望状态置为就绪,返回值也会被存储。这可以用在构建线程池的结构单元(可见第9章),或用于其他任务的管理,比如:在任务所在线程上运行其他任务,或将它们顺序的运行在一个特殊的后台线程上。当一个粒度较大的操作被分解为独立的子任务时,其中每个子任务都可以包含在一个std::packaged_task<>实例中,之后这个实例将传递到任务调度器或线程池中。对任务细节进行抽象,调度器仅处理std::packaged_task<>实例,而非处理单独的函数。
std::packaged_task<>的模板参数是一个函数签名,比如void()就是一个没有参数也没有返回值的函数,或int(std::string&, double*)就是有一个非const引用的std::string和一个指向double类型的指针,并且返回类型是int。当构造出一个std::packaged_task<>实例时,就必须传入一个函数或可调用对象;这个函数或可调用的对象,需要能接收指定的参数和返回可转换为指定返回类型的值。类型可以不完全匹配,可以用一个int类型的参数和返回一个float类型的函数,来构建std::packaged_task<double(double)>的实例,因为这里类型可以隐式转换。
函数签名的返回类型可以用来标识从get_future()返回的std::future<>的类型,而函数签名的参数列表,可用来指定packaged_task的函数调用操作符。例如,模板偏特化std::packaged_task<std::string(std::vector<char>*,int)>将在下面的代码清单中使用。
清单4.8 std::packaged_task<>的偏特化
template<>class packaged_task<std::string(std::vector<char>*,int)>{public:template<typename Callable>explicit packaged_task(Callable&& f);std::future<std::string> get_future();void operator()(std::vector<char>*,int);};
因为std::packaged_task对象是一个可调用对象,所以可以封装在std::function对象中,从而作为线程函数传递到std::thread对象中,或作为可调用对象传递另一个函数中,或可以直接进行调用。当std::packaged_task作为一个函数被调用时,实参将由函数调用操作符传递到底层函数,并且返回值作为异步结果存储在std::future,可通过get_future()获取。因此你可以把用std::packaged_task打包任务,并在它被传到别处之前的适当时机取回期望值。当需要异步任务的返回值时,你可以等待期望的状态变为“就绪”。下面的代码就是这么个情况。
线程间传递任务
很多图形架构需要特定的线程去更新界面,所以当一个线程对界面的更新时,它要发出一条信息给正确的线程,让特定的线程来做界面更新。std::packaged_task提供了实现这种功能的方法,且不需要发送一条自定义信息给图形界面相关线程。下面来看看代码。
清单4.9 使用std::packaged_task执行一个图形界面线程
#include <deque>#include <mutex>#include <future>#include <thread>#include <utility>std::mutex m;std::deque<std::packaged_task<void()> > tasks;bool gui_shutdown_message_received();void get_and_process_gui_message();void gui_thread() // 1{while(!gui_shutdown_message_received()) // 2{get_and_process_gui_message(); // 3std::packaged_task<void()> task;{std::lock_guard<std::mutex> lk(m);if(tasks.empty()) // 4continue;task=std::move(tasks.front()); // 5tasks.pop_front();}task(); // 6}}std::thread gui_bg_thread(gui_thread);template<typename Func>std::future<void> post_task_for_gui_thread(Func f){std::packaged_task<void()> task(f); // 7std::future<void> res=task.get_future(); // 8std::lock_guard<std::mutex> lk(m);tasks.push_back(std::move(task)); // 9return res; // 10}
这段代码十分简单:图形界面线程①循环直到收到一条关闭图形界面的信息后关闭②,进行轮询界面消息处理③,例如:用户点击和执行在队列中的任务。当队列中没有任务④,它将再次循环;除非,它能在队列中提取出一个任务⑤,然后释放队列上的锁,并且执行任务⑥。这里,期望值与任务相关,当任务执行完成时,其状态会被置为“就绪”状态。
将一个任务传入队列:提供的函数⑦可以提供一个打包好的任务,可以通过这个任务⑧调用get_future()成员函数获取期望值对象,并且在任务被推入列表⑨之前,期望值将返回调用函数⑩。当需要知道线程执行完任务时,向图形界面线程发布消息的代码,会等待期望值改变状态;否则,会丢弃这个期望值。
例子中使用std::packaged_task<void()>创建任务,其包含了一个无参数无返回值的函数或可调用对象(如果当这个调用有返回值时,返回值会被丢弃)。这可能是最简单的任务,如你之前所见,std::packaged_task也可以用于一些复杂的情况——通过指定一个不同的函数签名作为模板参数,不仅可以改变其返回类型(因此该类型的数据会存在期望相关的状态中),也可以改变函数操作符的参数类型。这个例子可以简单的扩展成允许任务运行在图形界面线程上,且接受传参,还有通过std::future获取返回值,而不仅仅是完成一个指标。
这些任务能作为一个简单的函数调用来表达吗?还有,任务的结果能从很多地方得到吗?这些问题可以使用第三种方法创建期望值来解决:使用std::promise对值进行显示设置。
4.2.3 使用(std::)promises
当一个应用需要处理很多网络连接时,它会使用不同线程尝试连接每个接口,因为这能使网络尽早联通,尽早执行程序。当连接较少的时候,工作没有问题(也就是线程数量比较少)。不幸的是,随着连接数量的增长,这种方式变的越来越不合适;因为大量的线程会消耗大量的系统资源,还有可能造成线程上下文频繁切换(当线程数量超出硬件可接受的并发数时),这都会对性能有影响。最极端的例子:系统资源被创建的线程消耗殆尽,系统连接网络的能力会变的极差。因此通过少数线程(可能只有一个)处理网络连接,每个线程同时处理多个连接事件,对需要处理大量的网络连接的应用而言是普遍的做法。
考虑一个线程处理多个连接事件,来自不同的端口连接的数据包基本上是以乱序方式进行处理的;同样的,数据包也将以乱序的方式进入队列。很多情况下,另一些应用不是等待数据成功的发送,就是等待一批(新的)来自指定网络接口的数据接收成功。
std::promise<T>提供设定值的方式(类型为T),这个类型会和后面看到的std::future<T> 对象相关联。一对std::promise/std::future会为这种方式提供一个可行的机制;期望值可以阻塞等待线程,同时,提供数据的线程可以使用组合中的承诺值来对相关值进行设置,并将期望值的状态置为“就绪”。
可以通过一个给定的std::promise的get_future()成员函数来获取与之相关的std::future对象,跟std::packaged_task的用法类似。当承诺值已经设置完毕(使用set_value()成员函数),对应期望值的状态变为“就绪”,并且可用于检索已存储的值。当在设置值之前销毁std::promise,将会存储一个异常。在4.2.4节中,会详细描述异常是如何传送到线程的。
清单4.10中,单线程处理多接口的实现,如同之前所说,在这个例子中,可以使用一对std::promise<bool>/std::future<bool>找出一块传出成功的数据块;与期望值相关的只是一个简单的“成功/失败”标识。对于传入包,与期望值相关的数据就是数据包的有效负载。
清单4.10 使用承诺值解决单线程多连接问题
#include <future>void process_connections(connection_set& connections){while(!done(connections)) // 1{for(connection_iterator // 2connection=connections.begin(),end=connections.end();connection!=end;++connection){if(connection->has_incoming_data()) // 3{data_packet data=connection->incoming();std::promise<payload_type>& p=connection->get_promise(data.id); // 4p.set_value(data.payload);}if(connection->has_outgoing_data()) // 5{outgoing_packet data=connection->top_of_outgoing_queue();connection->send(data.payload);data.promise.set_value(true); // 6}}}}
函数process_connections()中,直到done()返回true①为止。每一次循环,都会依次的检查每一个连接②,检索是否有数据③或正在发送已入队的传出数据⑤。假设输入数据包是具有ID和有效负载的(有实际的数在其中)。一个ID映射到一个std::promise(可能是在相关容器中进行的依次查找)④,并且值是设置在包的有效负载中的。对于传出包,包是从传出队列中进行检索的,实际上从接口直接发送出去。当发送完成,与传出数据相关的承诺值将置为true,来表明传输成功⑥。是否能映射到实际网络协议上,取决于网络所用协议;这里的“承诺值/期望值”组合方式可能在特殊的情况下无法工作,但它与一些操作系统支持的异步输入/输出结构类似。
上面的代码完全不理会异常,它可能在想象的世界中,一切工作都会很好的执行,但是这有悖常理。有时候磁盘满载,有时候会找不到东西,有时候网络会断,还有时候数据库会崩溃。当需要某个操作的结果时,就需要在对应的线程上执行这个操作,因为代码可以通过一个异常来报告错误;不过,这会对使用std::packaged_task或std::promise带来一些不必要的限制(在所有工作都正常的情况下)。因此,C++标准库提供了一种在以上情况下清理异常的方法,并且允许他们将异常存储为相关结果的一部分。
4.2.4 将异常存与期望值中
看完下面短小的代码段,思考一下,当你传递-1到square_root()中时,它将抛出一个异常,并且让这个异常被调用者看到:
double square_root(double x){if(x<0){throw std::out_of_range(“x<0”);}return sqrt(x);}
假设调用square_root()函数不是当前线程,
double y=square_root(-1);
将调用改为异步调用:
std::future<double> f=std::async(square_root,-1);double y=f.get();
如果行为是完全相同时,其结果是理想的;任何情况下,y获得函数调用的结果,当线程调用f.get()时,就能再看到异常了,即使在一个单线程例子中。
好吧,事实的确如此:函数作为std::async的一部分时,当调用抛出一个异常时,这个异常就会存储到期望值中,之后期望值的状态被置为“就绪”,之后调用get()会抛出这个已存储异常(注意:标准级别没有指定重新抛出的这个异常是原始的异常对象,还是一个拷贝;不同的编译器和库将会在这方面做出不同的选择)。将函数打包入std::packaged_task任务包中后,到任务被调用时,同样的事情也会发生;打包函数抛出一个异常,这个异常将被存储在期望值中,准备在get()调用时再次抛出。
当然,通过函数的显式调用,std::promise也能提供同样的功能。当存入的是一个异常而非一个数值时,就需要调用set_exception()成员函数,而非set_value()。这通常是用在一个catch块中,并作为算法的一部分,为了捕获异常,使用异常填充承诺值:
extern std::promise<double> some_promise;try{some_promise.set_value(calculate_value());}catch(...){some_promise.set_exception(std::current_exception());}
这里使用了std::current_exception()来检索抛出的异常,可用std::copy_exception()作为一个替代方案,std::copy_exception()会直接存储一个新的异常而不抛出:
some_promise.set_exception(std::copy_exception(std::logic_error("foo ")));
这比使用try/catch块更加清晰,当异常类型已知,就应该优先被使用;不是因为代码实现简单,而是它给编译器提供了极大的代码优化空间。
另一种向期望值中存储异常的方式是,在没有调用承诺值上的任何设置函数前,或正在调用包装好的任务时,销毁与std::promise或std::packaged_task相关的期望值对象。任何情况下,当期望值的状态还不是“就绪”时,调用std::promise或std::packaged_task的析构函数,将会存储一个与std::future_errc::broken_promise错误状态相关的std::future_error异常;通过创建一个期望值,可以构造一个承诺值为其提供值或异常;可以通过销毁值和异常源,去违背承诺值。这种情况下,编译器没有在期望值中存储任何东西,等待线程可能会永远的等下去。
直到现在,例子都在用std::future。不过,std::future也有局限性。很多线程在等待的时候,只有一个线程能获取等待结果。当多个线程需要等待相同的事件的结果,就需要使用std::shared_future来替代std::future了。
4.2.5 多个线程的等待
虽然std::future可以处理所有在线程间数据转移的同步,但是调用某一特殊std::future对象的成员函数,就会让这个线程的数据和其他线程的数据不同步。多线程在没有额外同步的情况下,访问一个独立的std::future对象时,就会有数据竞争和未定义的行为。这是因为std::future模型独享同步结果的所有权,并且通过调用get()函数,一次性的获取数据,这就让并发访问变的毫无意义——只有一个线程可以获取结果值,因为在第一次调用get()后,就没有值可以再获取了。
如果并行代码没有办法让多个线程等待同一个事件,先别太失落,std::shared_future可以来帮你解决。因为std::future是只移动的,所以其所有权可以在不同的实例中互相传递,但是只有一个实例可以获得特定的同步结果,而std::shared_future实例是可拷贝的,所以多个对象可以引用同一关联期望值的结果。
每一个std::shared_future的独立对象上,成员函数调用返回的结果还是不同步的,所以为了在多个线程访问一个独立对象时避免数据竞争,必须使用锁来对访问进行保护。优先使用的办法:为了替代只有一个拷贝对象的情况,可以让每个线程都拥有自己对应的拷贝对象。这样,当每个线程都通过自己拥有的std::shared_future对象获取结果,那么多个线程访问共享同步结果就是安全的。可见图4.1。
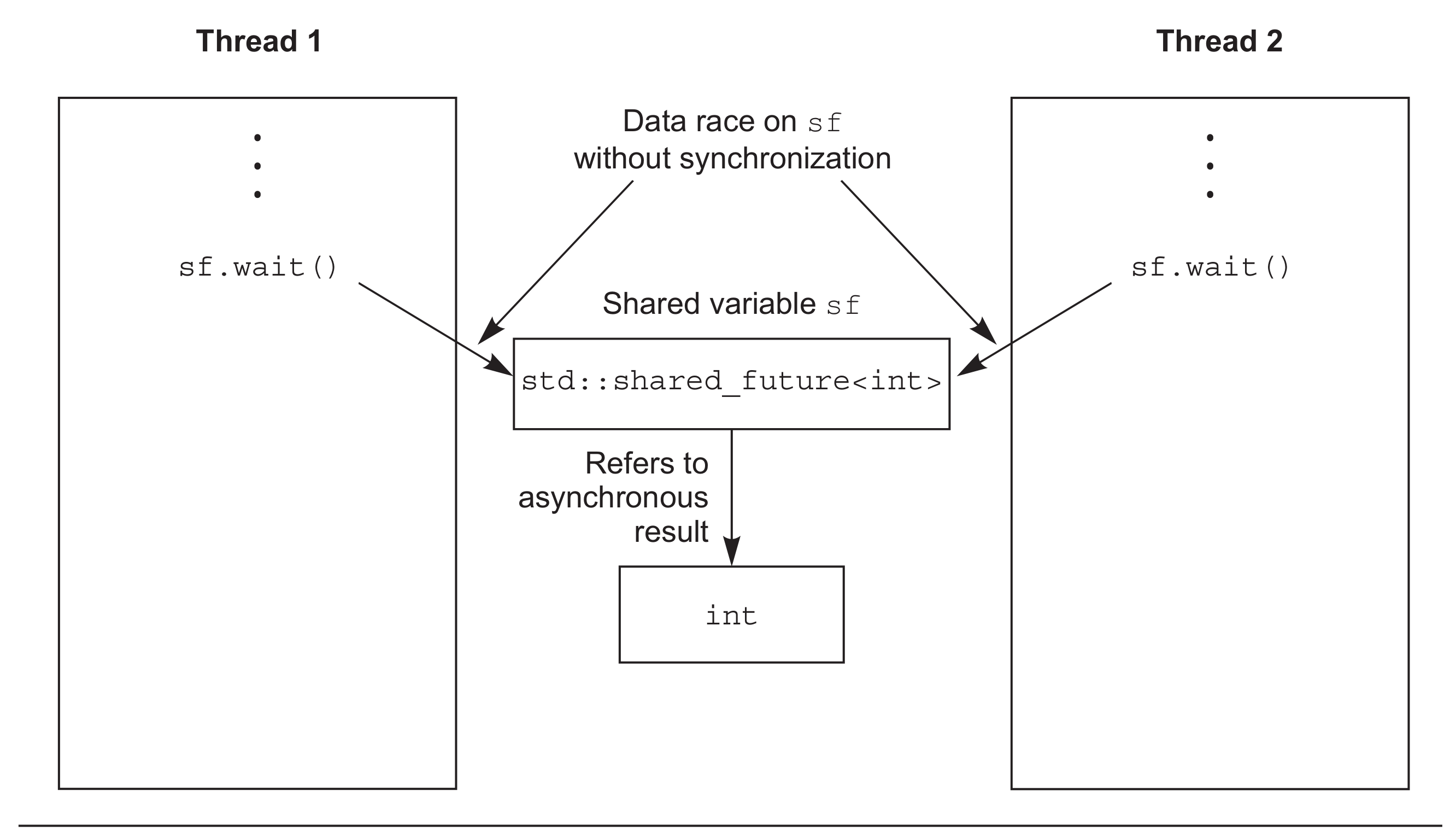
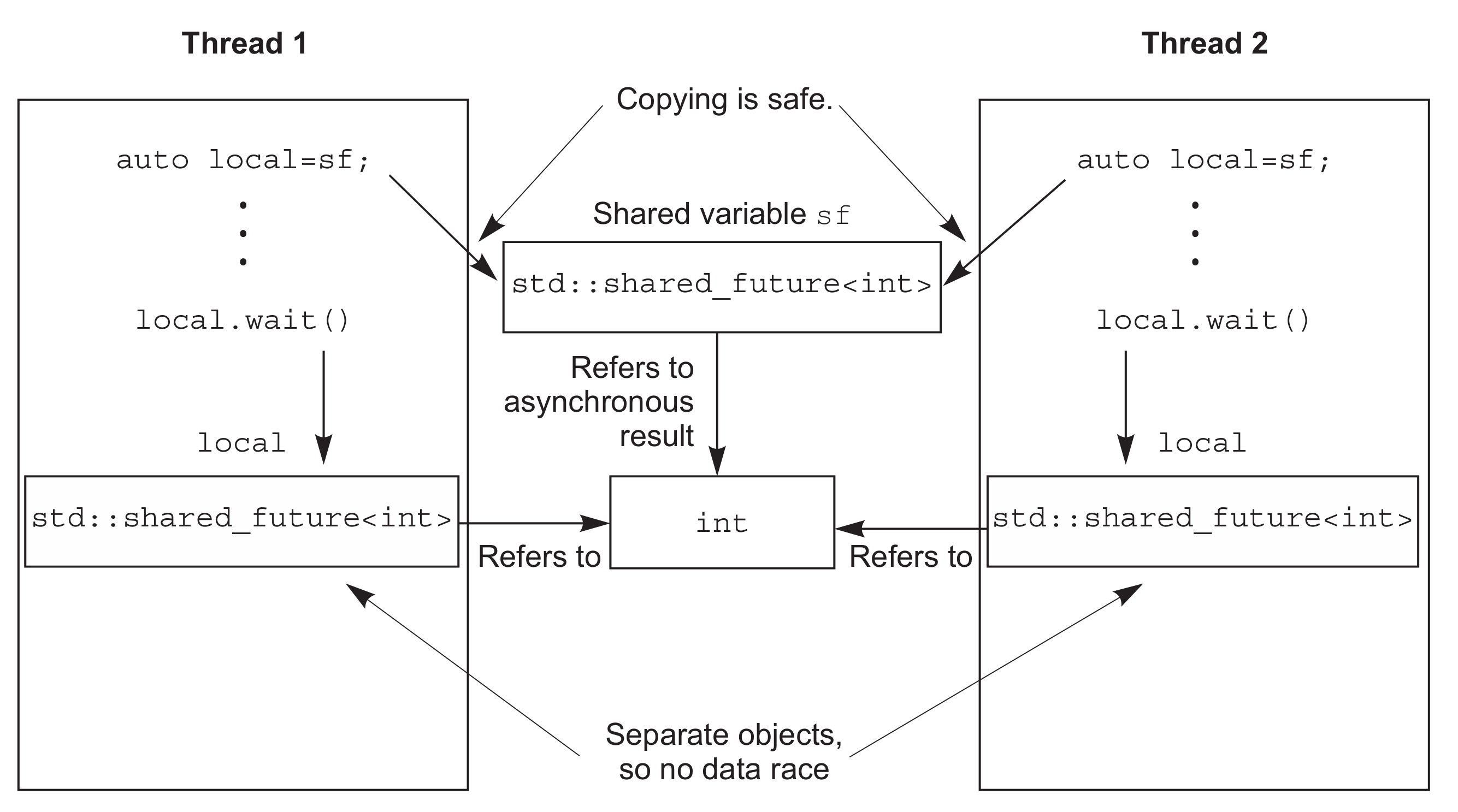
图4.1 使用多个std::shared_future对象来避免数据竞争
可能会使用std::shared_future的情况,例如:实现类似于复杂的电子表格的并行执行;每一个单元格有单一的终值,这个终值可能是由其他单元格中的数据通过公式计算得到的。公式计算得到的结果依赖于其他单元格,然后可以使用一个std::shared_future对象引用第一个单元格的数据。当每个单元格内的所有公式并行执行后,任务会以期望的方式完成工作;不过,当其中有计算需要依赖其他单元格的值,那么它就会被阻塞,直到依赖单元格的数据准备就绪。这将让系统在最大程度上使用硬件并发。
std::shared_future的实例同步std::future实例的状态。当std::future对象没有与其他对象共享同步状态所有权,那么所有权必须使用std::move将所有权传递到std::shared_future,其默认构造函数如下:
std::promise<int> p;std::future<int> f(p.get_future());assert(f.valid()); // 1 期望值 f 是合法的std::shared_future<int> sf(std::move(f));assert(!f.valid()); // 2 期望值 f 现在是不合法的assert(sf.valid()); // 3 sf 现在是合法的
这里,期望值f开始是合法的①,因为它引用的是承诺值p的同步状态,但是在转移sf的状态后,f就不合法了②,而sf就是合法的了③。
如其他可移动对象一样,转移所有权是对右值的隐式操作,所以可以通过std::promise对象的成员函数get_future()的返回值,直接构造一个std::shared_future对象,例如:
std::promise<std::string> p;std::shared_future<std::string> sf(p.get_future()); // 1 隐式转移所有权
转移所有权是隐式的,用一个右值构造std::shared_future<>,得到std::future<std::string>类型的实例①。
std::future的这种特性,可促进std::shared_future的使用,容器可以自动的对类型进行推断,从而初始化这个类型的变量(详见附录A,A.6节)。std::future有一个share()成员函数,可用来创建新的std::shared_future ,并且可以直接转移期望值的所有权。这样也就能保存很多类型,并且使得代码易于修改:
std::promise< std::map< SomeIndexType, SomeDataType, SomeComparator,SomeAllocator>::iterator> p;auto sf=p.get_future().share();
这个例子中,sf的类型推到为std::shared_future<std::map<SomeIndexType, SomeDataType, SomeComparator, SomeAllocator>::iterator>,一口气还真的很难念完。当比较器或分配器有所改动,你只需要对承诺值的类型进行修改即可;期望值的类型会自动更新,与承诺值的修改进行匹配。
有时你需要限定等待事件的时间,不论是因为时间上有硬性规定(一段指定的代码需要在某段时间内完成),还是因为在事件没有很快的触发时,有必要的工作需要特定线程来完成。为了处理这种情况,有非常多各种等待函数都能够指定超时任务。
[1] 《银河系漫游指南》(The Hitchhiker’s Guide to the Galaxy)中, 计算机在经过深度思考后,将“人生之匙和宇宙万物”的答案确定为42。
